



Press release
Source: Nissan
YOKOHAMA – In 2008, it was the flight of the bumblebee that inspired Nissan’s Biomimetic Car Robot Drive “BR23C” concept. In 2009, fish-inspired technology takes center stage in Nissan Motor Co., Ltd’s new Nissan “EPORO*1” robot car concept, which is designed to travel in a group of like-vehicles, mimicking the behavioral patterns of a school of fish in avoiding obstacles without colliding with each other.
Nissan will demonstrate this breakthrough technology with a group of six EPOROs when they make their world debut at the CEATEC JAPAN 2009, October 6 – 10 at the Makuhari Messe.
CEATEC JAPAN is an annual exhibition showcasing cutting-edge electronic and information technologies. Nissan is the only auto manufacturer that has been a participant in this exhibition since 2006. In addition to displaying the futuristic EPORO, Nissan Senior Vice President Minoru Shinohara will deliver a keynote speech, titled “The Future of the Automobile with Electric Vehicles and Car Robotics Evolution,” and participate in a panel discussion on “EV leads to a society of ‘All Electrification’ and ‘All Mobilisation.’” Nissan will also exhibit the new Skyline Crossover’s*2 current collision prevention technologies and provide test drives of an eco-drive diagnosis system utilising an iPhone®*3 application.
EPORO Robot Car
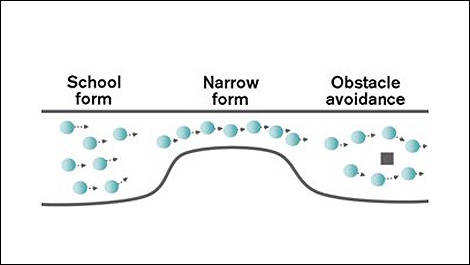
So what do a bumblebee and a school of fish have in common? Both demonstrate extraordinary “anti-collision” abilities, navigating instinctively and intelligently through challenging terrain by detecting and avoiding obstacles – just as future Nissan safety vehicles may have the capability to do. But where bees – and the BR23C robot car – are likely to travel alone, the schooling behavior of fish, or a group of vehicles, presents a far greater challenge in terms of collision avoidance. In developing EPORO, three rules of fish behavior were applied to its driving control.
Generically, fish recognise the surroundings based on lateral-line sense and sense of sight and form schools based on three behavior rules. A laser range finder*4 is used for lateral-line sense, while UWB*5 communications technology is utilised for the sense of sight.
Source: Nissan
YOKOHAMA – In 2008, it was the flight of the bumblebee that inspired Nissan’s Biomimetic Car Robot Drive “BR23C” concept. In 2009, fish-inspired technology takes center stage in Nissan Motor Co., Ltd’s new Nissan “EPORO*1” robot car concept, which is designed to travel in a group of like-vehicles, mimicking the behavioral patterns of a school of fish in avoiding obstacles without colliding with each other.
 |
| Nissan EPORO robot car |
Nissan will demonstrate this breakthrough technology with a group of six EPOROs when they make their world debut at the CEATEC JAPAN 2009, October 6 – 10 at the Makuhari Messe.
CEATEC JAPAN is an annual exhibition showcasing cutting-edge electronic and information technologies. Nissan is the only auto manufacturer that has been a participant in this exhibition since 2006. In addition to displaying the futuristic EPORO, Nissan Senior Vice President Minoru Shinohara will deliver a keynote speech, titled “The Future of the Automobile with Electric Vehicles and Car Robotics Evolution,” and participate in a panel discussion on “EV leads to a society of ‘All Electrification’ and ‘All Mobilisation.’” Nissan will also exhibit the new Skyline Crossover’s*2 current collision prevention technologies and provide test drives of an eco-drive diagnosis system utilising an iPhone®*3 application.
EPORO Robot Car
So what do a bumblebee and a school of fish have in common? Both demonstrate extraordinary “anti-collision” abilities, navigating instinctively and intelligently through challenging terrain by detecting and avoiding obstacles – just as future Nissan safety vehicles may have the capability to do. But where bees – and the BR23C robot car – are likely to travel alone, the schooling behavior of fish, or a group of vehicles, presents a far greater challenge in terms of collision avoidance. In developing EPORO, three rules of fish behavior were applied to its driving control.
Generically, fish recognise the surroundings based on lateral-line sense and sense of sight and form schools based on three behavior rules. A laser range finder*4 is used for lateral-line sense, while UWB*5 communications technology is utilised for the sense of sight.
 |